Overview & Main File Breakdown¶
Warning
For best UI experience, please use the web version of the documentation as opposed to the PDF version.
In this project, the Franka Emika “Panda” robot was programmed to play a game of Connect 4 against a human. The human and robot took turns playing by dropping their tokens in their chosen column until one won the game. To do this, multiple tools such as Computer Vision, a Minimax Game Algorithm, Motion Planning and Collision Detection were implemented.
Due to the limited access to the physical robot, extensive simulations of the robot’s motion were also performed, using Gazebo for visualisation.
Here is a quick introduction video of what the robot does.
The flow chart below shows an overview of the main program that plays the game.
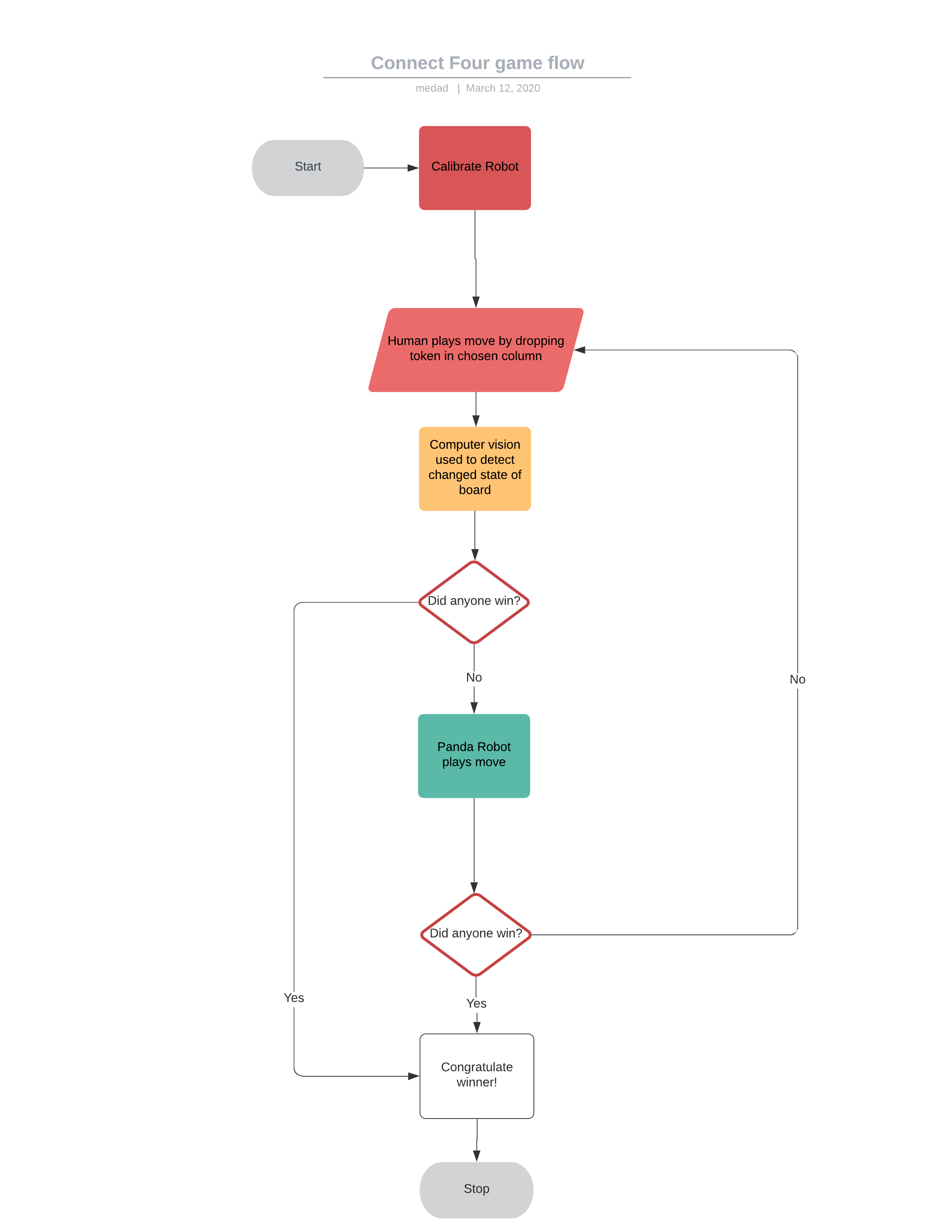
Now here is a brief overview of our main script that plays the game.
Importing Libraries¶
Warning
Although this is a python script, it will NOT run in an IDE in Windows. Many of the functions and libraries imported are specific for the ROS environment, which needs to be run on Ubuntu in a Virtual Machine with with necessary dependencies installed, or on computer with the necessary packages installed.
First it is necessary to import all of the required external functions and python libraries. Many driver functions were abstracted away in other python files to prevent cluttering up the main python file.
# Import required python files
import c4_bot_functions as botfunc
import open_cv as vision
from c4_class import Connect4Robot
# Import libraries
import sys
import copy
import rospy
import subprocess
import moveit_commander
import moveit_msgs.msg
import geometry_msgs.msg
import tf
from IO import bcolors
from time import sleep
from math import pi
from std_msgs.msg import String, Float64MultiArray, MultiArrayDimension, Float64
from moveit_commander.conversions import pose_to_list
Debug Switches¶
To aid debugging, a number of boolean variables were used to switch on and off sections of code during development. This is due to sections of code being non-functional/insufficiently tested initially. OpenCV took a long time to develop and test, so in the meantime a switch was used so that the rest of the code could be tested without relying on computer vision. The switches are set at the beginning of the main code flow as follows.
simulation_status = True
visionworking = False
Initialisation¶
When everything has been imported, the Franka Emika robot needs to be set up and initialised. The following code shows the setup procedure for this robot.
# Set up Franka Robot
moveit_commander.roscpp_initialize(sys.argv)
rospy.init_node('panda_demo', anonymous=True)
robot = moveit_commander.RobotCommander()
scene = moveit_commander.PlanningSceneInterface()
rospy.sleep(2)
# Get object frames
p = geometry_msgs.msg.PoseStamped()
#p = PoseStamped()
p.header.frame_id = robot.get_planning_frame()
p.pose.position.x = 0.4
p.pose.position.y = -0.301298
p.pose.position.z = -0.2
p.pose.orientation.x = 0.0
p.pose.orientation.y = 0
p.pose.orientation.z = 0.0
p.pose.orientation.w = 0.4440158
#scene.add_mesh("Connect4", p,"connect4.STL")
scene.add_box("table", p, (0.5, 1.5, 0.6))
rospy.sleep(2)
display_trajectory_publisher = rospy.Publisher('/move_group/display_planned_path', moveit_msgs.msg.DisplayTrajectory, queue_size=20)
# This command makes ros to change the 'allowed_start_tolerance' to 0.05. Prevents controller failure
ros_setup_message = """
rosservice call /move_group/trajectory_execution/set_parameters "config:
doubles:
- {name: 'allowed_start_tolerance', value: 0.05}"
"""
subprocess.call(ros_setup_message, shell=True)
PandaRobot = Connect4Robot()
After setup, it is necessary to define all of the positions that the robot arm will need to visit during calibration and gameplay with labels. This allowed us to call all target positions merely with a string variable name. The positions were as follows: "LeftCorner", "RightCorner" (for calibration), "column_1", "column_2" … "column_7" (for gameplay) and "DiskCollection" (resting position).
# Calibration positions
PandaRobot.define_coordinates([0.3, 0.35, 0.3, pi, 0, pi / 4])
# Initialise the positions the robot has to visit
PandaRobot.AddPosition("DiskCollection",
[PandaRobot.x1,
PandaRobot.y1 + 0.2,
PandaRobot.z1 + 0.1,
PandaRobot.roll1,
PandaRobot.pitch1,
PandaRobot.yaw1])
for i in range(0, 7):
PandaRobot.AddPosition("column_"+str(i),
[PandaRobot.x1,
PandaRobot.y1 + PandaRobot.interpolation(i),
PandaRobot.z1,
PandaRobot.roll1,
PandaRobot.pitch1,
PandaRobot.yaw1])
PandaRobot.robot_init()
Calibration & Game Setup¶
Now that the robot has been set up, the physical elements of the game have to be set up and calibrated before the gameplay can begin. Two calibration positions were added that allowed the physical Connect 4 board to be manually aligned with the robot arm. Although it sounds inefficient, this was actually the most reliable way to set up the game under time pressure, leaving more time to debug and test gameplay and motion planning. The calibration sequence could be advanced by pressing Enter, leaving as much time as was needed to position the board correctly.
Note
In the code block below, one might notice that in the highlighted line, a robot position is called that has not been defined above: PandaRobot.neutral().
This is actually the same as PandaRobot.DiskCollection(), but the neutral() position is defined in terms of joint angles, rather than the end-effector position in cartesian space.
This is to prevent the robot slowly working itself into a singularity, by resetting the joint angles before each game move. These calls are used interchangeably based on the context.
raw_input("Press Enter to move to DiskCollection point...")
PandaRobot.neutral()
raw_input("Press Enter to open gripper...")
PandaRobot.opengrip(simulation =simulation_status)
raw_input("Press Enter to close gripper...")
PandaRobot.closegrip(simulation =simulation_status)
raw_input("Press Enter to move to left corner...")
PandaRobot.MoveToPosition("LeftCorner")
raw_input("Press Enter to continue to right corner...")
PandaRobot.MoveToPosition("RightCorner")
raw_input("Press Enter to continue to game...")
Before the game can begin, the final step is to intialise all of the required static variables and variable states.
# Set player values for turn counter
PLAYER = 0
BOT = 1
# Set player piece values for board placement
PLAYER_PIECE = 1
BOT_PIECE = 2
# Set game algorithm difficulty (number of moves it looks ahead)
DEPTH = 4 # A higher value takes longer to run
# Initialise game
board = botfunc.create_board()
game_over = False
turn = 0 # Human goes first
Game Loop Breakdown¶
For the actual demonstration, the Computer Vision element of the project was not linked up to the column input, due to an issue with ROS Networking, so visionworking = False.
This meant that someone was required to manually type in the column input for the human player’s turn (however, this was cross-referenced & verified against the OpenCV output, to simulate a working system).
To avoid the whole loop crashing in the event of a mistyped entry, the input needed to be sanitised:
if turn == PLAYER:
if visionworking == False:
print("")
botfunc.pretty_print_board(board)
print("")
# Sanitise the input
while True:
try:
move = int(input("Human (Player 1) choose a column:"))
except:
print("Sorry, I didn't understand that.")
continue
if move not in range(0, 7):
print("Sorry you have keyed in a out of bounds column value")
continue
else:
col = move
break
Once the input has been typed, this column value (assigned to col) is then passed into functions from the c4_functions file (imported as botfunc), to complete the piece placement and board state analysis.
if botfunc.is_valid_location(board, col):
row = botfunc.get_next_open_row(board, col)
botfunc.drop_piece(board, row, col, PLAYER_PIECE)
if botfunc.winning_move(board, PLAYER_PIECE):
game_over = True
botfunc.pretty_print_board(board)
print("Human Wins!")
# Advance turn & alternate between Player 1 and 2
turn += 1
turn = turn % 2
Now that the turn has been advanced, it is the robot’s turn to make a move. The minimax game algorithm scans the board state, generates the decision tree, and returns a col value relating to the column in which a piece should be placed to play the best possible move.
This process is explained in further depth in the Connect 4 Algorithm section. This col value is then passed into the same function structure as above. In essence, the game is played and the piece is placed virtually before moving on to the robot arm movement.
if turn == BOT and not game_over:
# Ask Ro-Bot (Player 2) to pick the best move based on possible opponent future moves
col, minimax_score = botfunc.minimax(board, DEPTH, -9999999, 9999999, True)
print("Ro-Bot (Player 2) chose column: {0}".format(col))
if botfunc.is_valid_location(board, col):
row = botfunc.get_next_open_row(board, col)
botfunc.drop_piece(board, row, col, BOT_PIECE)
print("")
botfunc.pretty_print_board(board)
Having assigned the required column for the next move, this can also be passed into the function calls for the robot arm movement.
Note
It was decided that the gripper should be manually closed with an Enter command, to minimise the risk of mis-collecting the Connect 4 piece.
print("Ro-Bot is currently heading to disk collection point")
# Execute motion sequence
PandaRobot.neutral()
PandaRobot.opengrip(simulation =simulation_status)
raw_input("Press Enter to close gripper...")
PandaRobot.closegrip(simulation =simulation_status)
print("Ro-Bot is currently dropping the piece. Please wait!")
rospy.sleep(0.3)
PandaRobot.MoveToPosition(str(col))
PandaRobot.opengrip(simulation =simulation_status)
PandaRobot.closegrip(simulation =simulation_status)
if botfunc.winning_move(board, BOT_PIECE):
print("Ro-Bot Wins!")
game_over = True
# Advance turn & alternate between Player 1 and 2
turn += 1
turn = turn % 2
Final Game Loop¶
The whole game loop is shown below, for completion:
while not game_over:
if turn == PLAYER:
if visionworking == False:
print("")
botfunc.pretty_print_board(board)
print("")
# Sanitise the input
while True:
try:
move = int(input("Human (Player 1) choose a column:"))
except:
print("Sorry, I didn't understand that.")
continue
if move not in range(0, 7):
print("Sorry you have keyed in a out of bounds column value")
continue
else:
col = move
break
# Note - as it was not possible to connect up OpenCV to this input, this version of the 'else' code block is NOT final or refined
else:
# get new grid state from most recent capture
vision.GetPositions('updated_gridstate.jpg')
# analyse new grid state and get co-ordinate of most recent move
new_move = vision.get_row_and_col(coordinates)
# take the column index from the co-ordinate list, and assign to col
col = new_move[1]
if botfunc.is_valid_location(board, col):
row = botfunc.get_next_open_row(board, col)
botfunc.drop_piece(board, row, col, PLAYER_PIECE)
if botfunc.winning_move(board, PLAYER_PIECE):
game_over = True
botfunc.pretty_print_board(board)
print("Human Wins!")
# Advance turn & alternate between Player 1 and 2
turn += 1
turn = turn % 2
if turn == BOT and not game_over:
# Ask Ro-Bot (Player 2) to pick the best move based on possible opponent future moves
col, minimax_score = botfunc.minimax(board, DEPTH, -9999999, 9999999, True)
print("Ro-Bot (Player 2) chose column: {0}".format(col))
if botfunc.is_valid_location(board, col):
row = botfunc.get_next_open_row(board, col)
botfunc.drop_piece(board, row, col, BOT_PIECE)
print("")
#botfunc.print_board(board)
botfunc.pretty_print_board(board)
print("Ro-Bot is currently heading to disk collection point")
# Execute motion sequence
PandaRobot.neutral()
PandaRobot.opengrip(simulation =simulation_status)
raw_input("Press Enter to close gripper...")
PandaRobot.closegrip(simulation =simulation_status)
print("Ro-Bot is currently dropping the piece. Please wait!")
rospy.sleep(0.3)
PandaRobot.MoveToPosition(str(col))
PandaRobot.opengrip(simulation =simulation_status)
PandaRobot.closegrip(simulation =simulation_status)
if botfunc.winning_move(board, BOT_PIECE):
print("Ro-Bot Wins!")
game_over = True
# Advance turn & alternate between Player 1 and 2
turn += 1
turn = turn % 2
if game_over:
PandaRobot.neutral()
print('Game finished!')