Robot Motion¶
The primary function of the robot was to pick up the Connect four game token and drop it into the right column. Some of the motions carried out by the robot can be seen in this video
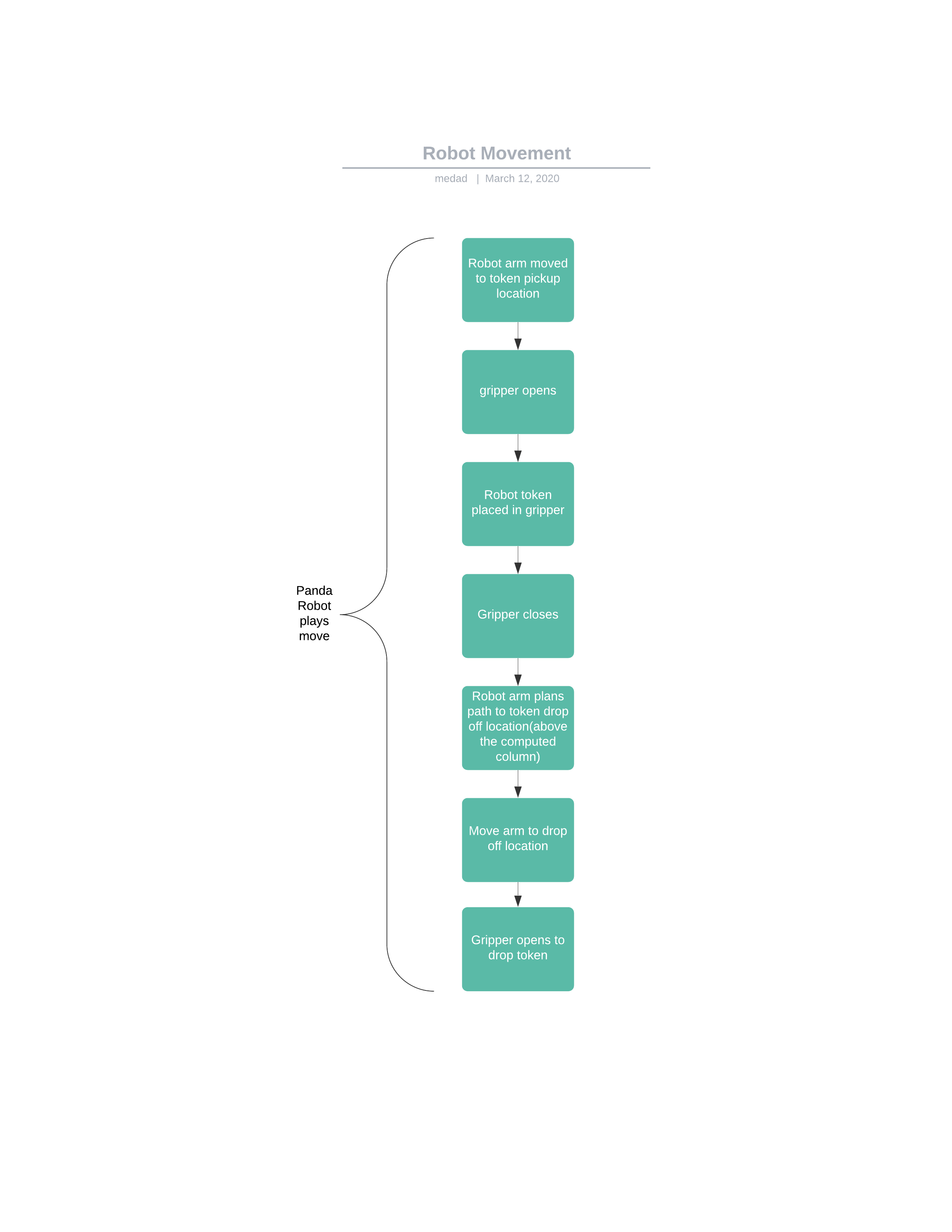
Here is an overview of the robot’s motion when it plays a move
A separate python script was created which contained the robot class with methods related to its motion. The class methods could be called to move the robot to a cartesian point, open and close the gripper and calibrate the robot’s position. Keeping the methods abstracted away in another file enabled us to keep the main python script clean and legible. The following in a breakdown of the methods within this Connect4Robot class.
Init¶
When an instance of the Connect4Robot is created, the method init() is automatically called. This defines the variables for opening and closing the gripper, which are used in their related methods. 2 groups are also created. These are “group”, which includes all the joints in the arm of the robot and “group2”, which includes the joints in the gripper. These are used by the moveit_commander library for moving the robot. Finally, a dictionary is initialised, which will be used for storing position names and cartesian coordinates.
def __init__(self, GripperSizeExtended=0.03, GripperSizeRetracted=0, group=moveit_commander.MoveGroupCommander(
"panda_arm"), group2 = moveit_commander.MoveGroupCommander("hand")):
''' Sets up the Inital setup conditions for the robot.
'''
self.GripperSizeRetracted = GripperSizeRetracted
self.GripperSizeExtended = GripperSizeExtended
self.group = group # All joints apart from the grippers
self.__positions__ = dict()
self.group2 = group2 # Gripper joints
Calibration¶
The calibration method has 2 purposes. The first is to check that the robot is operating correctly, which is done by making it move to a position and then open and close its gripper. The second is to enable the connect 4 board to be positioned correctly in the real world. This is done by making the Panda robot move its end effector to above where the 1st column on the board should be. Once the user has aligned the board beneath it, they should press Enter, and the end effector will move above the last column on the board. Since the exact height above the board is not important, this is enough to enable the board to be correctly positioned.
def Calibration(self):
''' Calibration function to align board and test robot '''
raw_input("Press Enter to move to DiskCollection point...")
self.MoveToPosition("DiskCollection")
raw_input("Press Enter to open gripper...")
self.opengrip()
raw_input("Press Enter to close gripper...")
self.closegrip()
raw_input("Press Enter to move to left corner...")
self.moveto([self.x1, self.y1, self.z1, self.roll1, self.pitch1, self.yaw1])
raw_input("Press Enter to continue to right corner...")
self.moveto([self.x2, self.y2, self.z2, self.roll2, self.pitch2, self.yaw2])
raw_input("Press Enter to continue to game...")
Define coordinates¶
This method enables us to reposition the board if we need to, as long as it remains perpendicular to the robot. We define where the left corner is going to be (as seen by the robot), and the right corner is automatically calculated. The coordinates of the left and right corners are then created as attributes so that all other positions in cartesian space can be defined relative to the board, and will auto-update if we change the location of the board. Being able to reposition the board is important so that we can test different places in the robot’s task space which lead to more reliable motion planning.
def define_coordinates(self, LeftCorner, dx=0, dy=-0.468, dz=0):
'''Defines top left corner of board (from pov of robot) relative to the robot and moves to calibration points'''
[x, y, z, roll, pitch, yaw] = LeftCorner
RightCorner = [x + dx, y + dy, z + dz, roll, pitch, yaw]
self.__positions__["LeftCorner"] = LeftCorner
self.__positions__["RightCorner"] = RightCorner
[self.x1, self.y1, self.z1, self.roll1, self.pitch1, self.yaw1] = LeftCorner
[self.x2, self.y2, self.z2, self.roll2, self.pitch2, self.yaw2] = RightCorner
AddPosition¶
This function is designed to store a coordinate in cartesian form in a private dictionary. It originally stored the variables in the form of a Moveit Pose class, however this was later changed, as it is very difficult to both view the values as well as making it very difficult to modify the values. The function remained partially to interact with legacy code, and partially as it was thought it might be useful to add in a sanitization layer.
def AddPosition(self , PositionName , PositionCordinates):
'''A setter function that sets up the positions for the robot to travel to'''
self.__positions__[PositionName] = PositionCordinates
Interpolation¶
This function was used to generate the coordinates of the columns. Interpolation was used as a method to avoid hard coding the column coordinates individually, and is used when the AddPosition method is called in the main function.
def interpolation(self, column):
ydistance = (self.y2-self.y1)/6 * (column-1)
return self.y1 + ydistance
Move to¶
This is a movement function that uses the moveit motion planner to move the robot. It takes in a position in cartesian list form, transforms it into the pose class, and then runs it directly through the motion planner. It then executes the plan.
def moveto(self, Position):
'''Moves to a given position, in form [x,y,z,roll,pitch,yaw]'''
# print("Moving to: ({},{},{}) with angle ({:.2f},{:.2f},{:.2f})".format(*Position))
# Converting the roll, pitch, yaw values to values which "moveit" understands
pose_goal = self.CordinatesToPose(Position)
self.group.set_pose_target(pose_goal) # Set new pose objective
plan = self.group.go(wait=True) # Move to new pose
rospy.sleep(0.5)
# It is always good to clear your targets after planning with poses.
self.group.clear_pose_targets()
Coordinates to pose¶
The human-legible cartesian position coordinates and rotations (x, y, z, roll, pitch, yaw), must be passed into a class for moveit to be able to interpret them. This starts by converting roll, pitch and yaw angles into quaternions and then converting these orientations as well as the Cartesian positions into a format understood by the moveit_controller library.
def CordinatesToPose(self, Position):
'''Takes in a cordinate and transforms it into a pose'''
x, y, z, roll, pitch, yaw = Position
quaternion = tf.transformations.quaternion_from_euler(roll, pitch, yaw)
pose = geometry_msgs.msg.Pose()
pose_o = pose.orientation
pose_o.x, pose_o.y, pose_o.z, pose_o.w = quaternion
# Defining target coordinates
pose.position.x = x
pose.position.y = y
pose.position.z = z
return pose
Move To Position¶
The function takes the name of a position and moves the robot to that position. It enabled us to feed in the position names defined in main.py.
def MoveToPosition(self ,Position):
'''Takes the name of the position and moves the robot to that position.'''
Cordinates = self.__positions__[Position]
self.moveto(Cordinates)
Move joints¶
This is the command for direct joint control of the robot. For the most part the use of motion planners and inverse kinematics was preferred for this project. Most of the motion planning was done with the moveto() and the MoveToPosition() commands. This function was added so that after every run the robot could head to a set joint position, the idea behind this being that it stopped the robot from gradually working its way into a singularity, something that would happen within the simulations.
def movejoints(self, jointAngles):
'''Takes in joint angles and moves to that pose'''
joint_goal = self.group.get_current_joint_values()
joint_goal = jointAngles
self.group.go(joint_goal, wait=True)
self.group.stop()
Neutral¶
Throughout the game the robot would slowly work itself into a singularity position after various successive moves, which meant it would become unable to move. In order to avoid this, a reset stage was required that would reconfigure the robot joints to a specific position after each move. Neutral() is a method which achieves this. It instructs the robot to move into a particular set of joint positions which orient it off to the side of the board. This method can be called after each time the robot plays a move, and can be used as the position from which it collects a disk.
def neutral(self):
''' Moves to disk collection position using joint angles.
Joint angles used so that the robot doesn't work itself into singularity. '''
self.movejoints([0.963,0.264,0.117,-1.806,-0.035,2.063,0.308])
Cartesian Path¶
Cartesian path is a function that takes in an Endposition for the robot to move to and uses the compute_cartesian_path() function to generate a cartesian path between the two. This function was useful, since for the most part it would keep the robot end effector along an easily predictable path. This gives much more stability than moveto(). The main difference between the two functions other than the motion planning is that Cartesian Path returns a true or false depending on weather or not it was successful.
def CartesianPath(self, Endposition , StartPosition = None , max_tries = 10):
'''Takes an Endpositions and generates and then acts on a motion plan to the Endposition using compute cartesian path. '''
if StartPosition:
StartPosition = self.CordinatesToPose(StartPosition)
else:
StartPosition = group.get_current_pose().pose
Endposition = self.CordinatesToPose(Endposition)
waypoints = []
# start with the current pose
waypoints.append(StartPosition)
waypoints.append(Endposition)
for i in range(max_tries):
(plan, fraction) = group.compute_cartesian_path (
waypoints, # waypoint poses
0.01, # eef_step
0.0, # jump_threshold
True) # avoid_collisions
if fraction == 1:
print("Motioned Planned Successfully")
break
else:
print("failed to run")
return False
self.group.execute(plan , wait = True)
self.group.clear_pose_targets()
return True
Robot Initialisation¶
Standard procedure, to clear the current targets to avoid conflicts.
def robot_init(self):
''' Clears targets, good to do after planning poses '''
self.group.clear_pose_targets()
Gripper Control¶
We had two options for controlling the gripper, one by using movit commander’s go(joint_goal, wait=True) function to move the gripper to the target location and using the GraspGoal(width=0.015,speed=0.08,force=1) function. Each had its drawbacks.
Using GraspGoal() function¶
When picking up the ConnnectFour token, ideally we would control both the position of gripper as well as the force it exerts. We do not want to exceed the maximum force that the gripper can produce, but we must ensure the token doesn’t fall off due to a lack of force. We therefore tried using the GraspGoal(width,speed,force) function to set the gripper in place and exert a force on the token such that it did not fall off. However, we discovered that the gripper would grip the token, and then release its grip as soon as the closegrip() function came to an end. We could not figure out why it kept relaxing its grip.
from franka_gripper.msg import GraspAction, GraspGoal
def closegrip(self, simulation=False, GripOveride=None):
rospy.init_node('Franka_gripper_grasp_action')
client = actionlib.SimpleActionClient('/franka_gripper/grasp', GraspAction)
rospy.loginfo("CONNECTING")
client.wait_for_server()
action = GraspGoal(width=0.015,speed=0.08,force=1)
rospy.loginfo("SENDING ACTION")
client.send_goal(action)
client.wait_for_result(rospy.Duration.from_sec(5.0))
rospy.loginfo("DONE")
Using go() function¶
What worked in the end was DIRECTLY setting the gripper position to the fully closed postion by setting both gripper’s position to 0 (fully closed). The gripper exerted a sufficient force to prevent the token from falling off. However, there was a good chance of failure when using this method. We set the gripper’s position to 0 despite the connect 4 token getting in the way of the gripper fully closing. The robot could have thrown an error as the connect 4 token obstacle was getting in the way of the gripper fully closing, preventing it from going to the fully closed 0 position. However we discovered that due to the small size of the token and the flexiblity of the gripper pads, the grippers could close fully without detecting the connect 4 token obstacle.
The code for closing the gripper is as follows
def closegrip(self, simulation=False, GripOveride=None):
''' Function to open the grip of the robot '''
joint_goal = self.group2.get_current_joint_values()
joint_goal[0] = 0.0
joint_goal[1] = 0.0
self.group2.go(joint_goal, wait=True)
self.group2.stop()
if simulation == True:
# For Gazebo simulation
if GripOveride == None:
GripOveride = self.GripperSizeExtended
gripper_publisher = rospy.Publisher('/franka/gripper_position_controller/command', Float64MultiArray,queue_size=1)
gripper_msg = Float64MultiArray()
gripper_msg.layout.dim = [MultiArrayDimension('', 2, 1)]
gripper_msg.data = [GripOveride, GripOveride]
gripper_publisher.publish(gripper_msg)
rospy.sleep(0.5)
Note
we have a separate function that broadcasts the gripper position to ROS. This is to ensure Gazebo sees the movement and displays accordingly. We create a gripper_publisher that publishes the new gripper position to the /franka/gripper_position_controller/command topic so that Gazebo can be updated.